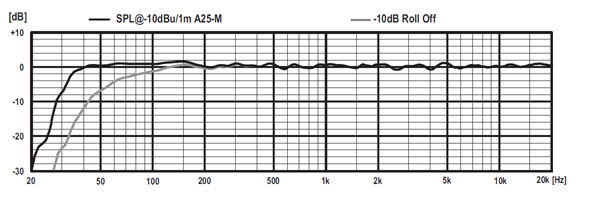
Charakterystyka częstotliwościowa, charakterystyka Bodego – to brzmi dumnie (i skomplikowanie). W rzeczywistości każdy ma szansę się z nimi zapoznać, jeśli np. kupuje słuchawki, głośniki, mikrofon (lub zagłębia się w dokumentację techniczną smartfona, która takie charakterystyki zawiera). W związku z tym, nawet jeśli nie mamy zamiaru wyznaczać takich charakterystyk, to warto wiedzieć, co one sobą przedstawiają i jak je interpretować. Spójrzmy np. na charakterystykę głośnika, przedstawioną na Rys. 1.
http://downloads.psiaudio.com/studio-monitors/PSI_A25_MS_techdata.pdf
Każdy punkt charakterystyki przedstawia informację o tym, jak układ (w tym przypadku, głośnik) przenosi drgania o określonej częstotliwości, pojawiające się na jego wejściu. Skąd się biorą drgania? Każdy dźwięk jest złożeniem drgań powietrza (a właściwie ośrodka, w którym się roznosi) o różnej częstotliwości. Nagrywamy dźwięk, przekształcając w mikrofonie falę akustyczną na natężenie prądu – a następnie, podczas odtwarzania, ma miejsce odwrotny proces. Gdyby założyć, że nagrywanie oraz przesył sygnału są idealne, to moglibyśmy mówić, że charakterystyka pokazuje, czy dźwięk pochodzący z głośnika jest zniekształcony w stosunku do oryginału, czy też nie. Jest to maksymalne uproszczenie problemu, ale oddające ideę charakterystyki. (W rzeczywistości, na wejściu układu jest prąd elektryczny, więc charakterystyka może co najwyżej przedstawiać, jak dokładnie układ odwzorowuje już nagrany dźwięk, który może być częściowo zniekształcony przez mikrofon – jego charakterystyka pojawi się za chwilę – a do tego dochodzi jeszcze wpływ charakterystyk wzmacniacza oraz kabla, którym łączymy wzmacniacz z głośnikiem. Trzeba jeszcze zauważyć, że układ jest nieliniowy, co dodatkowo utrudnia analizę – ale po co ja to komplikuję?). Zostańmy przy tym maksymalnym uproszczeniu.
Przedstawiona na Rys. 1 charakterystyka jest charakterystyką amplitudową. Pokazuje, jak zmienia się amplituda drgań na wyjściu układu, w porównaniu do amplitudy drgań na wejściu. Zwykle stosuje się skalę logarytmiczną dlatego wartość „0 dB” na charakterystyce odpowiada dokładnemu przenoszeniu drgań (amplitudy drgań na wyjściu i na wejściu są identyczne, więc ich stosunek równy jest jedności – a log(1)=0). Widzimy więc, że układ, którego charakterystyka została przedstawiona na Rys. 1 kolorem czarnym, przenosi drgania w zakresie od mniej więcej 40 Hz do 20 kHz (na tej wartości kończy się charakterystyka na rysunku – w rzeczywistości to pasmo jest nieco szersze). Ponieważ zakres częstotliwości, które słyszymy, mieści się (dla przeciętnego człowieka) w zakresie ok 16 Hz – 20 (niektórzy podają 22) kHz, to można przyjąć, że z takiego głośnika powinniśmy być zadowoleni (a dla głębokich basów trzeba będzie coś dokupić).
Przy okazji, proszę zwrócić uwagę na to, że oś pozioma również jest w skali logarytmicznej (logarytm o podstawie 10 – odległość pomiędzy 10 a 100 jest taka sama jak między 100 a 1000).
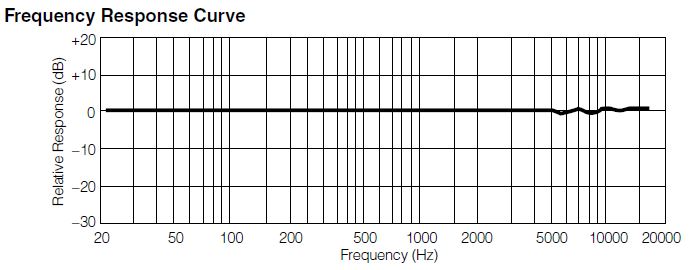
Podobnie można przedstawić charakterystyki mikrofonu. na Rys. 2 i 3 można zobaczyć charakterystyki dwóch różnych mikrofonów, o różnym przeznaczeniu. Pierwszy z nich (Rys. 2), jest przykładem typowego mikrofonu estradowego. Dźwięki o charakterystyce poniżej 100 Hz są tłumione (charakterystyka poniżej linii „0”), przy czym tłumienie jest tym większe, im niższa częstotliwość. Pozwala to m.in. na wytłumienia drgań, mających swe źródło w zasilaniu różnych urządzeń prądem zmiennym (50 Hz) oraz w drganiach sceny. W zakresie 100 Hz-2kHz charakterystyka jest płaska, wartości w okolicach 0 (skala logarytmiczna – czyli drgania sa przenoszone), co pozwala na wyłapanie dużej części wokalu. W zakresie 2kHz-10kHz wokal jest wzmacniany, by mógł się przebić przez dźwięki, pochodzące z instrumentów, które w przeciwnym wypadku „przykryłyby” go (pamiętajmy jednak, że jeśli chcielibyśmy dokładniej się temu przyjrzeć, należałoby jeszcze uwzględnić charakterystyki kabli i głośników). Z kolei mikrofon o charakterystyce przedstawionej na Rys. 3 w identyczny sposób przenosi wszystkie dźwięki do ok. 16kHz, zapewniając ich wierne odwzorowanie na nagraniu.

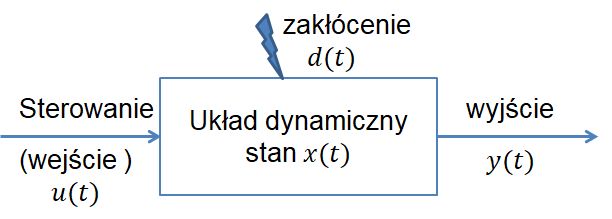
Ale nie tylko w urządzeniach audio charakterystyki częstotliwościowe mają znaczenie. Wyobraźmy sobie dwa taśmociągi i robota między nimi, którego zadaniem jest przekładanie elementów z jednego taśmociągu na drugi (Rys. 4).
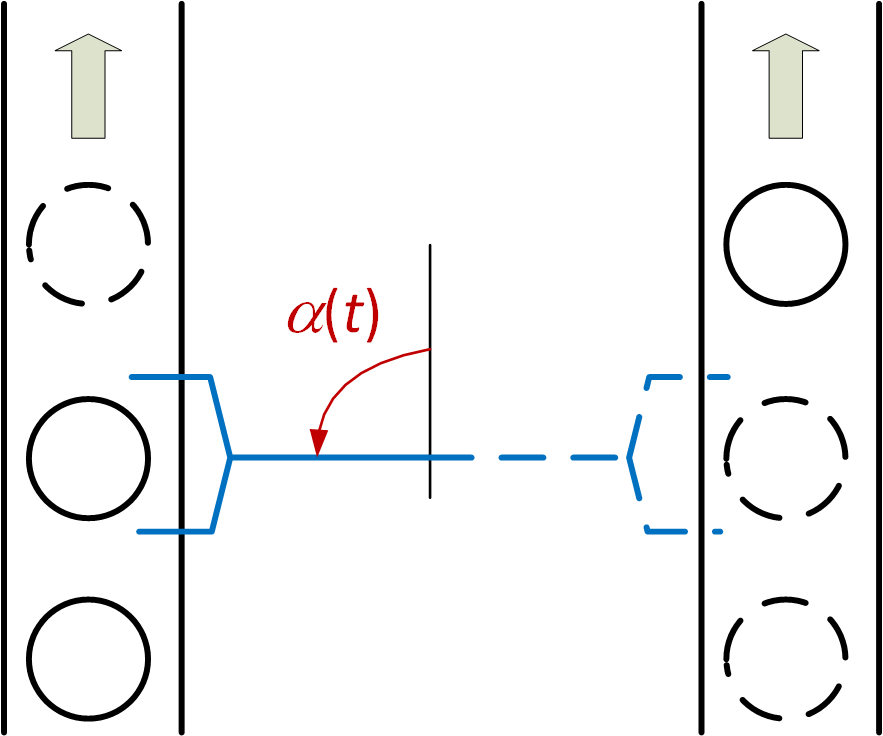
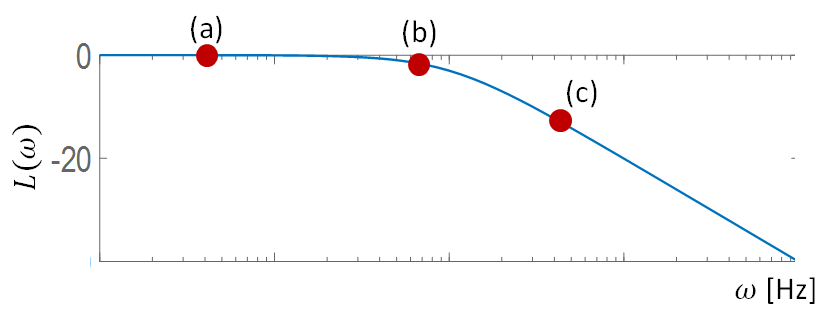
Jedno z założeń projektowych może dotyczyć szybkości przesuwania taśmociągów – czy robot zdąży przełożyć element z jednej strony na drugą? Odpowiedzi na to pytanie może dostarczyć charakterystyka amplitudowa ramienia robota. Na Rys. 5 zaznaczono trzy punkty. Jeśli będziemy zmieniać sterowanie silnika, obracającego ramię robota niezbyt szybko (punkt (a)), to bez najmniejszych problemów robot zdąży przenieść elementy z jednego taśmociągu na drugi (Rys. 5a). Jeśli zwiększymy częstotliwość zmian (punkt (b)), to co prawda ramię robota zdąży obrócić się z jednego zadanego położenia w drugie, ale najprawdopodobniej nie zdąży złapać i upuścić elementów (Rys. 5b). Jeśli jeszcze bardziej zwiększymy częstotliwość zmian zadanego położenia (a co za tym idzie, częstotliwość sygnału sterującego silnikiem – punkt (c)), to położenie ramienia robota będzie oscylować – trochę w lewo, trochę w prawo, ale nigdy nie dojdzie do zadanego (Rys. 5c).
Jeśli sygnałem wejściowym jest zakłócenie, to interpretacja charakterystyki amplitudowej jest identyczna – mówi, jakie zakłócenia są przez układ przenoszone, jakie wzmacniane, a jakie tłumione.
Wiemy już, jak interpretować charakterystyki amplitudowe. Skąd one się biorą? Z dwóch źródeł. Po pierwsze, na etapie projektowania układu określamy, jak, z punktu widzenia przeznaczenia naszego układu, powinna wyglądać charakterystyka – trzeba ją więc umieć obliczyć (i o tym w kolejnym wpisie). Należy jednak pamiętać, że przy wyznaczaniu charakterystyk zazwyczaj mocno upraszczamy opis matematyczny układu. Dlatego charakterystyki, jak pokazane na Rys. 1-3, są wyznaczane eksperymentalnie – mierzymy amplitudę drgań wyjściowych układu pobudzanego drganiami o określonej częstotliwości i zaznaczamy punkt na charakterystyce. A potem zmieniamy częstotliwość drgań na wejściu i znajdujemy kolejny punkt charakterystyki… pamiętając (kto może) o ograniczeniach metody w przypadku układów nieliniowych (kiedyś dojdę do wpisu na ten temat).
Jeśli wpis Ci się spodobał i uważasz, że może warto, by Twoi znajomi go przeczytali – proszę poleć go.



 oznacza pochodną funkcji
oznacza pochodną funkcji  rzędu
rzędu  . Jeśli założymy powyższą postać ogólną, to w celu zdefiniowania układu wystarczy określić współczynniki
. Jeśli założymy powyższą postać ogólną, to w celu zdefiniowania układu wystarczy określić współczynniki  i
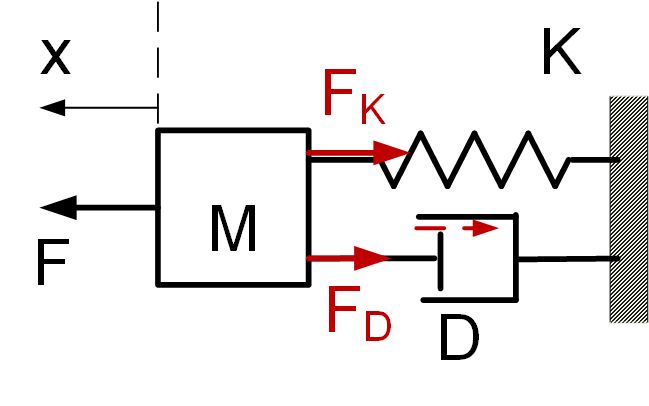
i  . W odpowiednio skonstruowanym interfejsie użytkownika programu, umożliwiającego symulację układów dynamicznych, wprowadzenie danych ([M D K], [1]) jednoznacznie pozwoli zdefiniować nasz układ mechaniczny (trzy elementy w pierwszym nawiasie oznaczają, że są trzy współczynniki równania z lewej strony, odpowiednio M, D i K, dla kolejnych pochodnych, coraz niższego rzędu, a 1 w drugim nawiasie oznacza, że wejście mnożone jest przez jeden). Jednocześnie, możemy otworzyć podręcznik do równań różniczkowych, gdzie znajdziemy sposób rozwiązania takiego równania, a dla pewnych, określonych postaci funkcji
. W odpowiednio skonstruowanym interfejsie użytkownika programu, umożliwiającego symulację układów dynamicznych, wprowadzenie danych ([M D K], [1]) jednoznacznie pozwoli zdefiniować nasz układ mechaniczny (trzy elementy w pierwszym nawiasie oznaczają, że są trzy współczynniki równania z lewej strony, odpowiednio M, D i K, dla kolejnych pochodnych, coraz niższego rzędu, a 1 w drugim nawiasie oznacza, że wejście mnożone jest przez jeden). Jednocześnie, możemy otworzyć podręcznik do równań różniczkowych, gdzie znajdziemy sposób rozwiązania takiego równania, a dla pewnych, określonych postaci funkcji  – nawet gotowe rozwiązanie.
– nawet gotowe rozwiązanie. 
 (wcale tak być nie musi – moglibyśmy być zainteresowani np. prędkością i wtedy
(wcale tak być nie musi – moglibyśmy być zainteresowani np. prędkością i wtedy  )
)
 i
i  oznaczają transformaty Laplace’a, odpowiednio, funkcji
oznaczają transformaty Laplace’a, odpowiednio, funkcji  mnożeniem przez
mnożeniem przez  ). Po uporządkowaniu otrzymujemy
). Po uporządkowaniu otrzymujemy
 . Transmitancję
. Transmitancję  można wyznaczyć albo przekształcając równanie opisujące dynamikę układu, tak by zmienną w nim było
można wyznaczyć albo przekształcając równanie opisujące dynamikę układu, tak by zmienną w nim było  ,
,  (znów pomijamy warunek początkowy
(znów pomijamy warunek początkowy  ), czyli
), czyli
 w dziedzinie czasu… Tylko, że taka odpowiedź nikogo nie satysfakcjonuje… Może kolejne wpisy pokażą, do czego ta zmienna może się przydać (każdy może sobie wyobrazić, co to znaczy
w dziedzinie czasu… Tylko, że taka odpowiedź nikogo nie satysfakcjonuje… Może kolejne wpisy pokażą, do czego ta zmienna może się przydać (każdy może sobie wyobrazić, co to znaczy  [sekund], ale niekoniecznie, co to znaczy, że
[sekund], ale niekoniecznie, co to znaczy, że  ). Zachęcam do śledzenia dalszych wpisów. Na razie powinno wystarczyć, że
). Zachęcam do śledzenia dalszych wpisów. Na razie powinno wystarczyć, że  to magiczny symbol, który pojawił się w wyniku zastosowania transformacji Laplace’a 🙂
to magiczny symbol, który pojawił się w wyniku zastosowania transformacji Laplace’a 🙂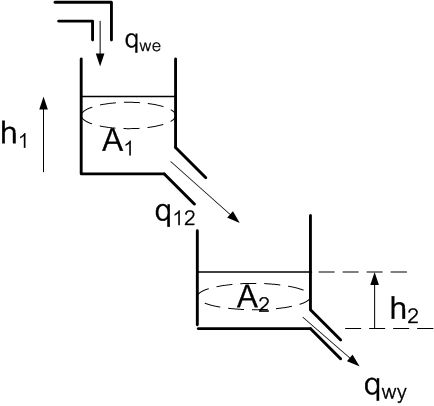
 i
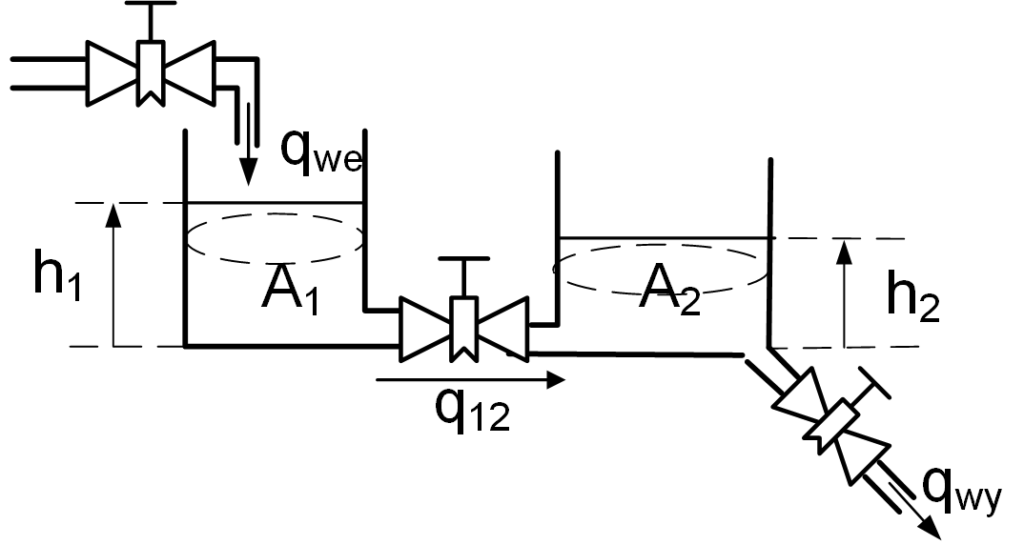
i  , a wyjściem jest przepływ
, a wyjściem jest przepływ  . Układ opisany jest równaniami (patrz wpis dotyczący opisu zbiorników)
. Układ opisany jest równaniami (patrz wpis dotyczący opisu zbiorników)






 , będące wyjściem z pierwszego zbiornika, jest jednocześnie wejściem do drugiego zbiornika, co można przedstawić za pomocą schematu blokowego z Rys. 4.
, będące wyjściem z pierwszego zbiornika, jest jednocześnie wejściem do drugiego zbiornika, co można przedstawić za pomocą schematu blokowego z Rys. 4.


 jako
jako 
 , ale jej cech charakterystycznych, o czym będzie w kolejnych wpisach.
, ale jej cech charakterystycznych, o czym będzie w kolejnych wpisach.
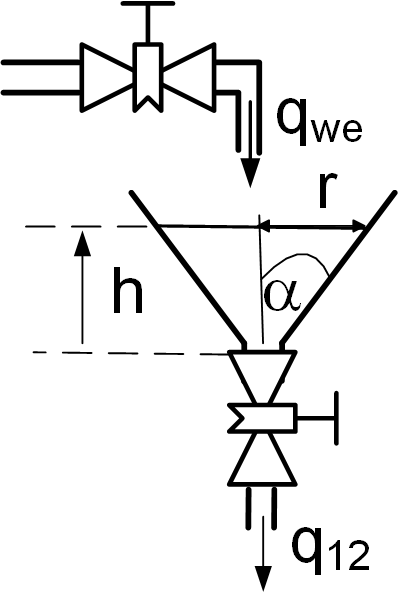
 . Zależy ono tak naprawdę od ciśnienia wejściowego i charakterystyki oraz stopnia otwarcia zaworu, ale dla uproszczenia posługiwać się będziemy właśnie przepływem. Równania dla zbiorników oparte są na bardzo prostej regule – różnica między ilością cieczy wpływającej i wypływającej ze zbiornika stanowi przyrost objętości cieczy w tym zbiorniku:
. Zależy ono tak naprawdę od ciśnienia wejściowego i charakterystyki oraz stopnia otwarcia zaworu, ale dla uproszczenia posługiwać się będziemy właśnie przepływem. Równania dla zbiorników oparte są na bardzo prostej regule – różnica między ilością cieczy wpływającej i wypływającej ze zbiornika stanowi przyrost objętości cieczy w tym zbiorniku: .
.  , otrzymujemy
, otrzymujemy .
. ,
, jest współczynnikiem proporcjonalności.
jest współczynnikiem proporcjonalności. .
. .
.
 .
. i
i  , oraz uwzględniając zależność
, oraz uwzględniając zależność  , otrzymujemy
, otrzymujemy  i możemy obliczyć zmianę objętości
i możemy obliczyć zmianę objętości  w czasie jako
w czasie jako .
. ,
,
 , a w przypadku przepływu turbulentnego
, a w przypadku przepływu turbulentnego  . W tym drugim przypadku, musimy przy tym założyć, że
. W tym drugim przypadku, musimy przy tym założyć, że  – w przeciwnym wypadku przepływ
– w przeciwnym wypadku przepływ  (jest ujemny, ponieważ skierowany w stronę przeciwną, niż wskazuje strzałka na rysunku). Takie zastrzeżenie nie jest potrzebne przy opisie przepływu laminarnego (dlaczego?).
(jest ujemny, ponieważ skierowany w stronę przeciwną, niż wskazuje strzałka na rysunku). Takie zastrzeżenie nie jest potrzebne przy opisie przepływu laminarnego (dlaczego?). ,
, .
.



 ,
,





 ,
,  ,
,  ,
,  ,
,  ,
,  i
i  , i siedem równań – czyli opis jest kompletny. Posługiwanie się nim byłoby jednak niewygodne, stąd zwykle redukujemy liczbę równań i zmiennych, stosując podstawienia z jednego równania do kolejnych. W zależności od tego, jak chcemy ustandaryzować formę opisu, posługiwać się będziemy albo układem dwóch równań pierwszego rzędu (tzn. bez pochodnych wyższych rzędów):
, i siedem równań – czyli opis jest kompletny. Posługiwanie się nim byłoby jednak niewygodne, stąd zwykle redukujemy liczbę równań i zmiennych, stosując podstawienia z jednego równania do kolejnych. W zależności od tego, jak chcemy ustandaryzować formę opisu, posługiwać się będziemy albo układem dwóch równań pierwszego rzędu (tzn. bez pochodnych wyższych rzędów): 

 z pierwszego równania:
z pierwszego równania: