Poprzednie wpisy pokazały, że opis układów dynamicznych przyjmuje postać układu równań różniczkowych i algebraicznych. Jeśli interesuje nas odpowiedź układu (czyli zmiany w czasie wielkości, które ten układ charakteryzują, np. napięcia, prędkości, położenia itd.) na zadane wymuszenie, należałoby te równania rozwiązać. Można się jednak przy tym mocno spocić. Od czegóż jednak jedna z ważnych umiejętności człowieka – umiejętność wykorzystania czegoś, co już zrobił ktoś inny?
Trudno jednak przypuszczać, by każdy układ, z którym się spotkamy, był już dokładnie przez kogoś przeanalizowany (choć, oczywiście, przykłady przywoływane w moich wpisach były już na wszelkie możliwe sposoby analizowane, i to wielokrotnie, przez wiele różnych osób). Wielu matematyków poświęciło lata pracy na rozwiązywanie równań, w których pojawiały się tajemnicze parametry, i dostarczyło nam gotowych narzędzi. Trzeba jednak zdawać sobie sprawę z tego, że narzędzia te wymagają uporządkowania opisu matematycznego modelu. Każdy ze wspomnianych matematyków zaczynał bowiem od mniej więcej takiego stwierdzenia: „Załóżmy, że równanie przyjmuje następującą postać …”. Tak więc, zanim zaczniemy korzystać z owoców ich pracy, musimy przekształcić opis matematyczny do jednej ze standardowych postaci (stosując, jak to w podręcznikach często jest zapisane, „proste przekształcenia”).
Pamiętając o tym, że (przynajmniej na razie) zajmujemy się stacjonarnymi układami liniowymi (czyli opisanymi liniowymi równaniami różniczkowymi o stałych parametrach), do wyboru mamy trzy typy takiego standardowego opisu:
- pojedyncze równanie różniczkowe (w bieżącym wpisie pojawi się tylko, raz ponieważ (chyba) dużo wygodniej jest posługiwać się dwoma pozostałymi typami)
- transmitancja operatorowa (w tym wpisie – dla układów o jednym wejściu i jednym wyjściu);
- liniowe równania stanu i wyjścia (tymi zajmę się w osobnym wpisie).
Oprócz tego, że przedstawienie opisu układu w ustandaryzowanej postaci pozwala skorzystać z rozwiązań, wyprowadzonych wcześniej dla „przypadków ogólnych”, jest ono niezbędne, jeśli chcemy wykorzystać oprogramowanie do symulacji lub analizy własności danego układu (bo dane wejściowe, wprowadzane do jakiegokolwiek programu powinny mieć określoną strukturę, ustaloną na etapie pisania kodu tego programu).
Przyjrzyjmy się pierwszemu z przykładów mechanicznych, przedstawionemu we wcześniejszym wpisie (Rys. 1).
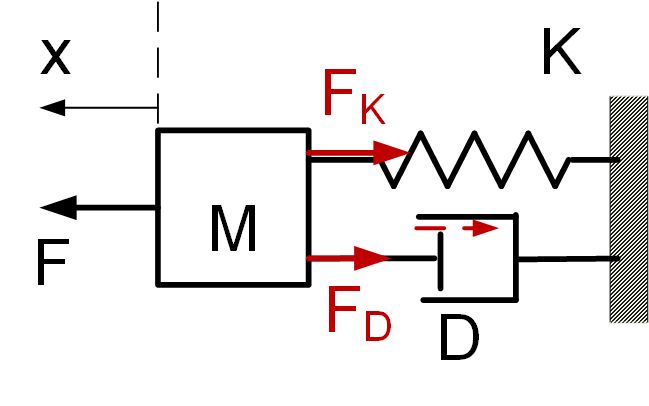
Jest on opisany następującym równaniem:

Jeśli uporządkujemy opis w taki sposób, by zmienna opisująca położenie masy (i jej pochodne) znalazły się z jednej strony równania, a wymuszenie z drugiej:

to taki opis będzie pasował do ustandaryzowanego, pojedynczego równania różniczkowego w ogólnej postaci:

gdzie  oznacza pochodną funkcji
oznacza pochodną funkcji  rzędu
rzędu  . Jeśli założymy powyższą postać ogólną, to w celu zdefiniowania układu wystarczy określić współczynniki
. Jeśli założymy powyższą postać ogólną, to w celu zdefiniowania układu wystarczy określić współczynniki  i
i  . W odpowiednio skonstruowanym interfejsie użytkownika programu, umożliwiającego symulację układów dynamicznych, wprowadzenie danych ([M D K], [1]) jednoznacznie pozwoli zdefiniować nasz układ mechaniczny (trzy elementy w pierwszym nawiasie oznaczają, że są trzy współczynniki równania z lewej strony, odpowiednio M, D i K, dla kolejnych pochodnych, coraz niższego rzędu, a 1 w drugim nawiasie oznacza, że wejście mnożone jest przez jeden). Jednocześnie, możemy otworzyć podręcznik do równań różniczkowych, gdzie znajdziemy sposób rozwiązania takiego równania, a dla pewnych, określonych postaci funkcji
. W odpowiednio skonstruowanym interfejsie użytkownika programu, umożliwiającego symulację układów dynamicznych, wprowadzenie danych ([M D K], [1]) jednoznacznie pozwoli zdefiniować nasz układ mechaniczny (trzy elementy w pierwszym nawiasie oznaczają, że są trzy współczynniki równania z lewej strony, odpowiednio M, D i K, dla kolejnych pochodnych, coraz niższego rzędu, a 1 w drugim nawiasie oznacza, że wejście mnożone jest przez jeden). Jednocześnie, możemy otworzyć podręcznik do równań różniczkowych, gdzie znajdziemy sposób rozwiązania takiego równania, a dla pewnych, określonych postaci funkcji  – nawet gotowe rozwiązanie.
– nawet gotowe rozwiązanie.
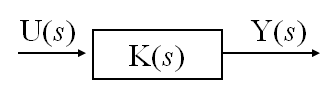
Najczęściej jednak układ taki zostanie przedstawiony w postaci tzw. transmitancji operatorowej, opisującej w ustandaryzowany sposób zależność pomiędzy wejściem a wyjściem układu (korzyści takiego podejścia zostaną przedstawione w kolejnych wpisach). Możemy posługiwać się wtedy prostym schematem zastępczym, reprezentującym układ, przedstawionym na Rys. 2:
W celu wyznaczenia transmitancji należy dokonać transformacji Laplace’a równań opisujących dynamikę układu, a następnie odpowiednich przekształceń algebraicznych. Ponieważ transmitancja ma przedstawiać sobą zależność wyjścia od wejścia, a nie od warunków początkowych, podczas transformacji Laplace’a zakłada się zerowe warunki początkowe w układzie (co z tego wynika – w odrębnym wpisie).
Zakładając, że we wspomnianym układzie mechanicznym wyjściem jest położenie, czyli  (wcale tak być nie musi – moglibyśmy być zainteresowani np. prędkością i wtedy
(wcale tak być nie musi – moglibyśmy być zainteresowani np. prędkością i wtedy  )
)

gdzie  i
i  oznaczają transformaty Laplace’a, odpowiednio, funkcji i (dla niewtajemniczonych – podczas transformacji Laplace’a zastępujemy pochodne rzędu
oznaczają transformaty Laplace’a, odpowiednio, funkcji i (dla niewtajemniczonych – podczas transformacji Laplace’a zastępujemy pochodne rzędu  mnożeniem przez
mnożeniem przez  ). Po uporządkowaniu otrzymujemy
). Po uporządkowaniu otrzymujemy

Jeśli interesowałaby nas prędkość masy, a nie jej położenie, wtedy wyjściem byłoby  . Transmitancję
. Transmitancję  można wyznaczyć albo przekształcając równanie opisujące dynamikę układu, tak by zmienną w nim było , a nie , albo korzystając z zależności pomiędzy tymi zmiennymi. Ponieważ
można wyznaczyć albo przekształcając równanie opisujące dynamikę układu, tak by zmienną w nim było , a nie , albo korzystając z zależności pomiędzy tymi zmiennymi. Ponieważ  ,
,  (znów pomijamy warunek początkowy
(znów pomijamy warunek początkowy  ), czyli
), czyli
(1) 
Zauważmy, że:
- Ten sam układ fizyczny można przedstawić za pomocą różnych transmitancji, w zależności od tego, co jest jego wyjściem.
- Mianownik tych transmitancji jest taki sam (a, bardziej precyzyjnie, ma takie same miejsca zerowe).
- Transmitancja ma postać ułamka, w którym zarówno licznik, jak i mianownik są wielomianami, a współczynnikami tych wielomianów są liczby lub wyrażenia zawierające parametry układu (przy okazji – w modelach rzeczywistych układów fizycznych stopień wielomianu w liczniku zawsze jest mniejszy lub równy stopniowi wielomianu w mianowniku). Można, co prawda, wskazać układy, których transmitancja zawiera nie tylko wielomiany (np. nieskończeniewymiarowy podsystem modelu sterowanego systemu masowej obsługi), ale na razie o tak skomplikowanych układach nie będziemy mówić.
Najtrudniejsze (w sensie – jak odpowiedzieć, żeby pytającego usatysfakcjonować) pytanie – a co to takiego to „s”?
Odpowiedź jest w zasadzie prosta – to zmienna pomocnicza, która odpowiada zmiennej  w dziedzinie czasu… Tylko, że taka odpowiedź nikogo nie satysfakcjonuje… Może kolejne wpisy pokażą, do czego ta zmienna może się przydać (każdy może sobie wyobrazić, co to znaczy
w dziedzinie czasu… Tylko, że taka odpowiedź nikogo nie satysfakcjonuje… Może kolejne wpisy pokażą, do czego ta zmienna może się przydać (każdy może sobie wyobrazić, co to znaczy  [sekund], ale niekoniecznie, co to znaczy, że
[sekund], ale niekoniecznie, co to znaczy, że  ). Zachęcam do śledzenia dalszych wpisów. Na razie powinno wystarczyć, że
). Zachęcam do śledzenia dalszych wpisów. Na razie powinno wystarczyć, że  to magiczny symbol, który pojawił się w wyniku zastosowania transformacji Laplace’a 🙂
to magiczny symbol, który pojawił się w wyniku zastosowania transformacji Laplace’a 🙂
Jeśli układ opisany jest większą liczbą równań, w celu wyznaczenia transmitancji należy dokonać transformacji Laplace’a wszystkich z nich. Przyjrzyjmy się układowi, przedstawionemu na Rys. 3.
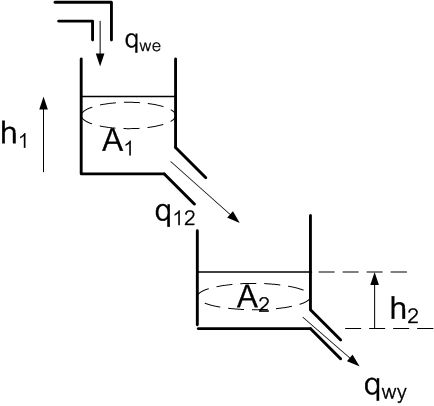
Załóżmy, że przepływy są laminarne, czyli  i
i  , a wyjściem jest przepływ
, a wyjściem jest przepływ  . Układ opisany jest równaniami (patrz wpis dotyczący opisu zbiorników)
. Układ opisany jest równaniami (patrz wpis dotyczący opisu zbiorników)

czyli, po uzględnieniu zależności pomiędzy przepływami a odpowiednimi poziomami cieczy

Po dokonaniu transformacji Laplace’a obu równań (i założeniu zerowych warunków początkowych, o czym już w dalszych wpisach nie będę przypominał):

Po uporządkowaniu zapisu w każdym z równań otrzymujemy:

czyli

Ostatecznie

czyli

Przy okazji, zauważmy, że  , będące wyjściem z pierwszego zbiornika, jest jednocześnie wejściem do drugiego zbiornika, co można przedstawić za pomocą schematu blokowego z Rys. 4.
, będące wyjściem z pierwszego zbiornika, jest jednocześnie wejściem do drugiego zbiornika, co można przedstawić za pomocą schematu blokowego z Rys. 4.

Jeśli, tak jak na rysunku, każdy ze zbiorników potraktujemy jako osobny układ, opisany transmitancją, to transmitancja całości (połączenia szeregowego takich układów) jest iloczynem transmitancji części składowych (Rys. 5).

Na podstawie transmitancji możemy wiele powiedzieć o zachowaniu układu – np., czy po podaniu stałego wymuszenia w odpowiedzi pojawią się oscylacje (a jeśli tak, to o jakiej częstotliwości), jak szybko układ będzie reagował na zmiany wymuszenia, czy będzie przenosił, czy tłumił drgania o określonej częstotliwości, pojawiające się na wejściu. Ponadto, biorąc pod uwagę, że

Możemy wyznaczyć odpowiedź układu na dowolne wymuszenie  jako
jako

No dobrze – to ostatnie akurat nie musi być takie proste. Najczęściej jednak nie potrzebujemy pełnej postaci analitycznej (czyli wzoru) funkcji  , ale jej cech charakterystycznych, o czym będzie w kolejnych wpisach.
, ale jej cech charakterystycznych, o czym będzie w kolejnych wpisach.
Jeśli wpis Ci się spodobał i uważasz, że może warto, by Twoi znajomi go przeczytali – proszę poleć go.