Ponoć jeden obraz zastępuje tysiąc słów – to niech będą dwa tysiące:

Układ dynamiczny – to taki, którego zachowanie, opisane pewnymi wielkościami, zmienia się w czasie. Może nas interesować tylko końcowy efekt (coś, co będzie dalej nazywane stanem ustalonym), ale jeśli naprawdę mamy mówić o dynamice układów, to końcowy efekt będzie jedynie drobnym elementem rozważań, a główny nacisk będzie położony na sposób dochodzenia do stanu ustalonego (bądź na brak takowego stanu).
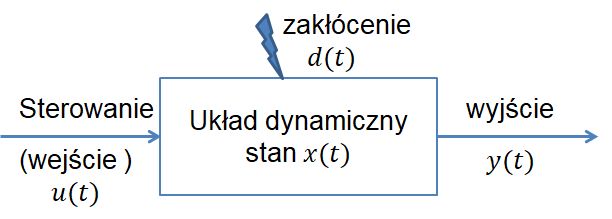
W powyższym zdaniu chyba się zagalopowałem – trudno się wyzwolić z okowów języka akademickiego. Spróbujmy inaczej. Wyobraźmy sobie, że mamy do czynienia z prostym podajnikiem, który po włączeniu powinien coś podnieść na zadaną wysokość (uwaga: przykład maksymalnie uproszczony, tak by łatwo można było sobie wyobrazić, co przedstawia poniższy wykres – proszę się nie czepiać). W najprostszym modelu (żeby nie straszyć, schematu ani równań dla tego przykładu nie będzie) wejściem (sterowaniem) jest siła, jakiej należy użyć, a wyjściem – wysokość, na jaką udało się podnieść nasz ciężar. Oczywiście, im ciężar większy, tym większej siły należy użyć. Urządzenie jest tak skonstruowane, że po jego włączeniu (zadaniu stałej siły na wejściu), po pewnym (najlepiej krótkim) czasie podajnik osiąga pewną stałą wysokość i jego położenie przestaje się zmieniać (ustala się – stąd nazwa „stan ustalony”).
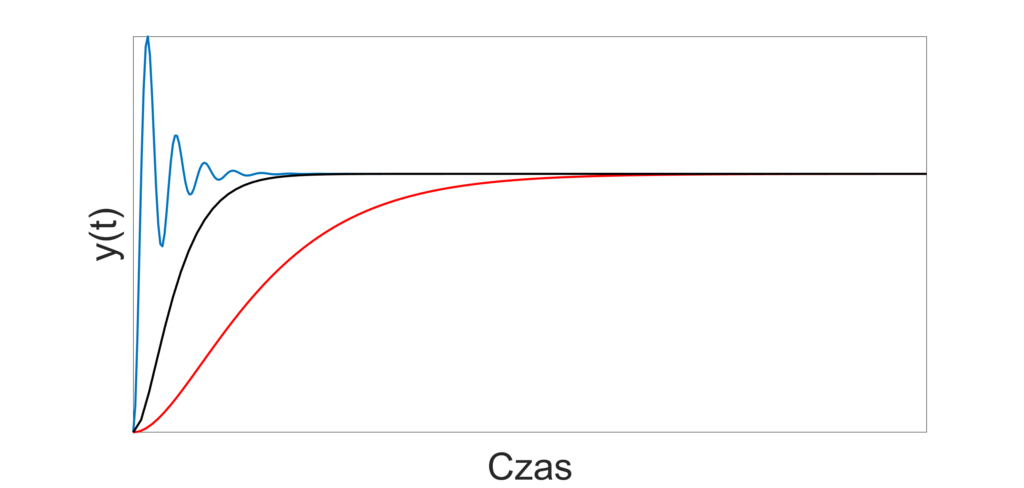
Pierwsze pytanie, jakie należy zadać, brzmi: „Jak dużą siłą powinniśmy zadziałać?”. Załóżmy, że potrafimy odpowiedzieć na to pytanie. To jednak nie wystarczy, by można było ogłosić sukces. W zależności od tego, jakie elementy zostały wykorzystane do konstrukcji podajnika, jego położenie może w różny sposób dążyć do wymaganej przez nas wartości ustalonej (patrz rysunek poniżej).
I tu dochodzimy do pierwszego z celów zajmowania się dynamiką układów – zdobycia umiejętności przewidywania, jak układ się zachowa w odpowiedzi na konkretne wymuszenie i wykorzystania tej wiedzy w projektowaniu układów (w tym doborze elementów składających się na układ). Patrzymy przy tym na różne cechy takich układów – na pierwszy rzut skupmy się na (chyba) najbardziej oczywistych :
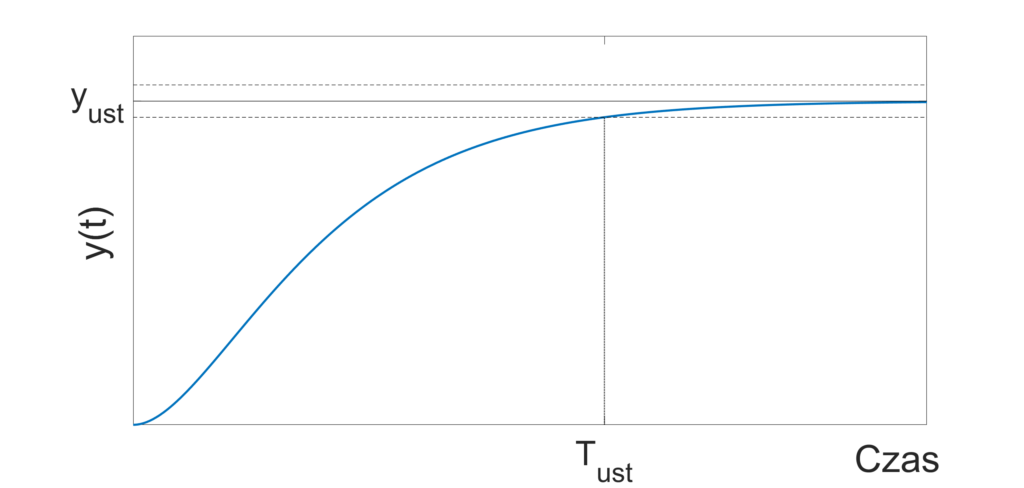
- Jak szybko układ dojdzie do stanu ustalonego (trzeba to jeszcze zdefiniować – np. po jakim czasie wartość wyjścia będzie się utrzymywać w przedziale +/-5% wartości stanu ustalonego?
- Czy w układzie pojawią się oscylacje, czy też układ będzie dążył do stanu ustalonego bez oscylacji („aperiodycznie”)?
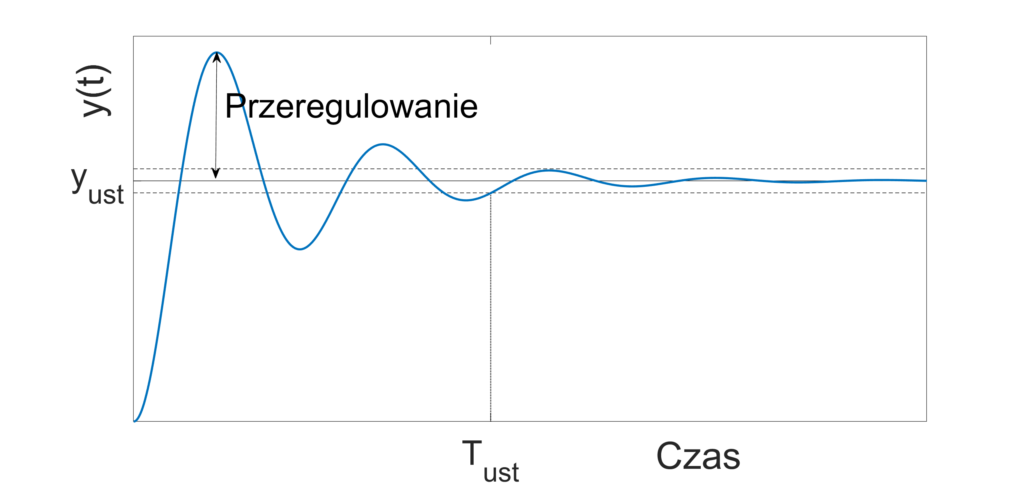
- Jak duże przeregulowania pojawią się na wyjściu?
Oczywiście, można dochodzić do odpowiedzi na te pytania metodą prób i błędów – ale chyba lepiej najpierw trochę policzyć, zasymulować, a dopiero potem budować prototyp układu, który chcielibyśmy sprzedać za duże pieniądze… Zwłaszcza, że metoda prób i błędów może sporo kosztować…
Jak już wiemy, jak układ zareaguje na konkretne wymuszenia, możemy przejść do następnego etapu – jak kształtować sterowanie, żeby układ zachowywał się dokładnie w taki sposób, jakiego od niego oczekujemy. Przykładowo, jeśli mamy do czynienia z robotem, który ma przenieść w poziomie element z jednego miejsca na drugie, to pytanie brzmi: Jak sterować silnikami, które poruszają poszczególnymi członami robota? A jeśli chcemy naładować akumulator samochodu elektrycznego – to jak zmieniać napięcie (natężenie prądu) w urządzeniu ładującym, żeby to zrobić w najkrótszym czasie?
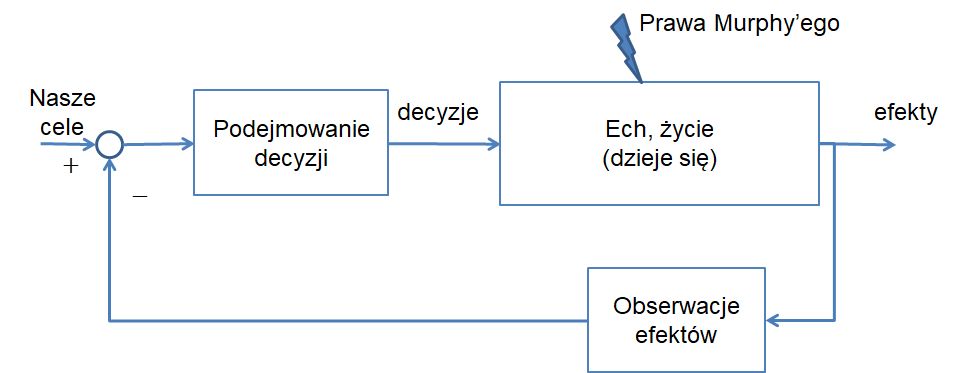
Problem w tym, że nawet jeśli to my skonstruowaliśmy układ, to jego parametry znamy jedynie z pewną dokładnością. Ponadto, jak pokażę w kolejnych wpisach, model, umożliwiający udzielenie odpowiedzi na zadane powyżej pytania, jest zawsze uproszczonym opisem rzeczywistości. W dodatku, na układ, oprócz naszego sterowania, mogą oddziaływać jeszcze zakłócenia. W związku z tym, staramy się sterować nie w układzie otwartym (tak jak na Rys. 1), ale w torze zamkniętym, wykorzystując informację z urządzeń pomiarowych do tego, aby osiągnąć pożądany efekt:

A to już jest automatyka… Do której kiedyś dojdziemy… Ale też życie:
Jeśli wpis Ci się spodobał i uważasz, że może warto, by Twoi znajomi go przeczytali – proszę poleć go.